Back to ProjectsView on GitHub
3-DOF Helicopter Controller
January 2025 - April 2025
MATLAB
Simulink
Control Systems
PID Controllers
Feed-forward Compensation
software
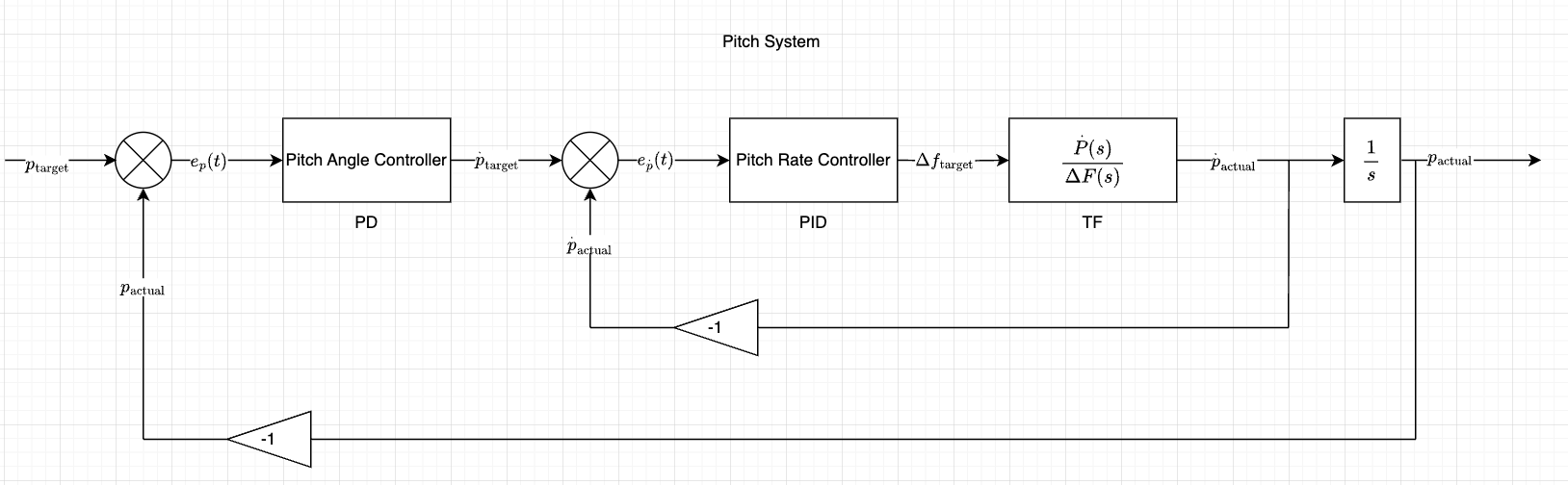
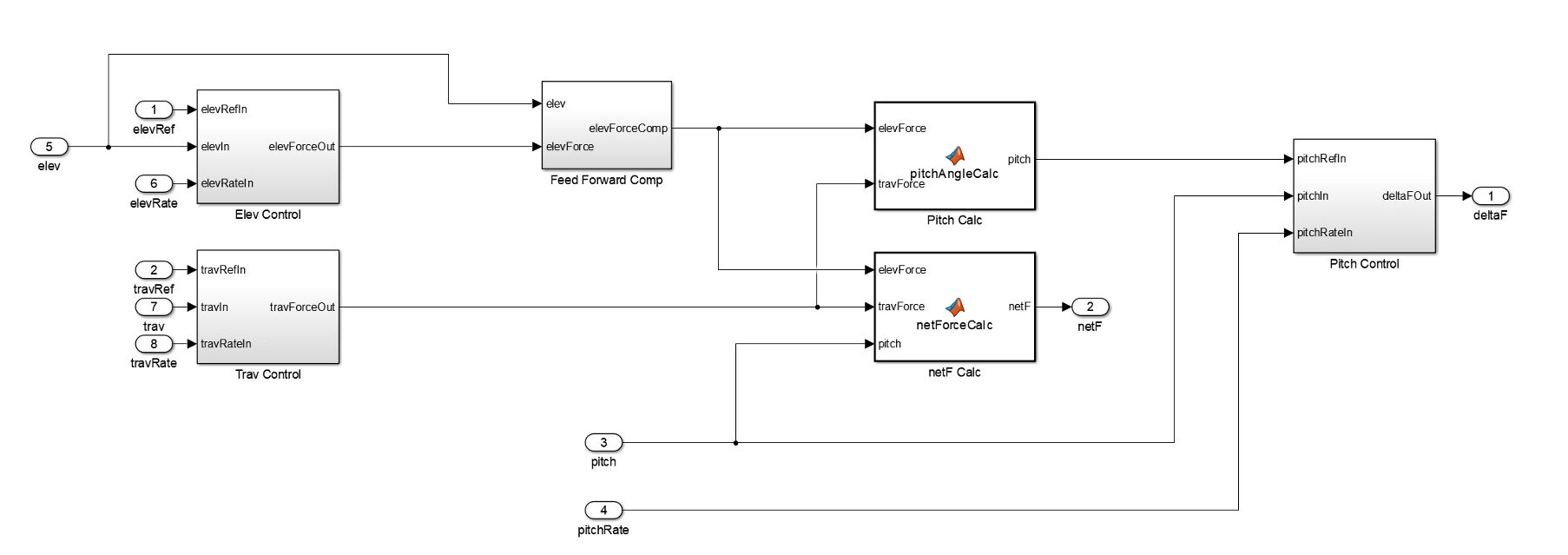
I developed a control system for an under-actuated 3-DOF helicopter with two propellers for autonomous trajectory control.
Key achievements:
- Enabled SIL testing by developing a nonlinear dynamical force and torque based model class for simulating a 3-DOF helicopter using MATLAB and Simulink with vector maths
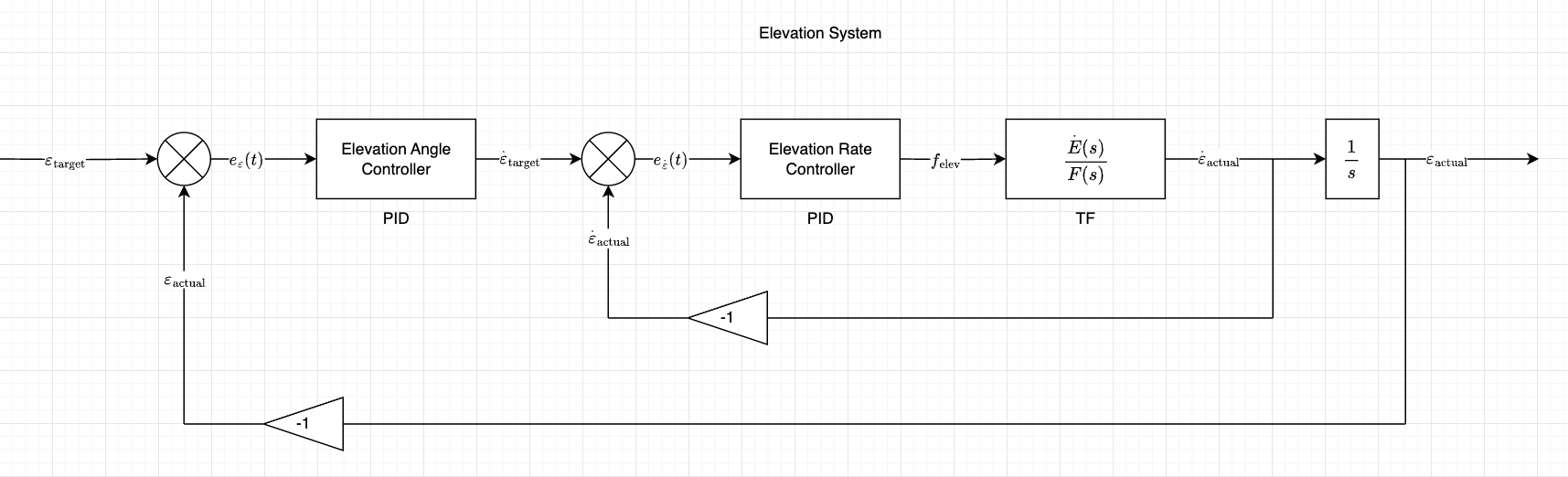
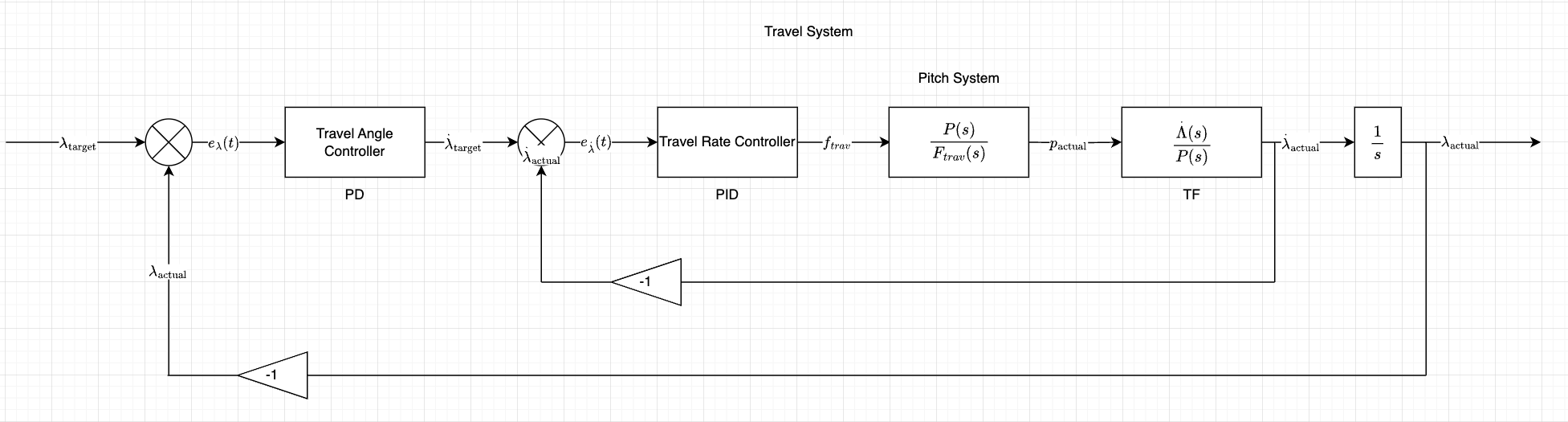
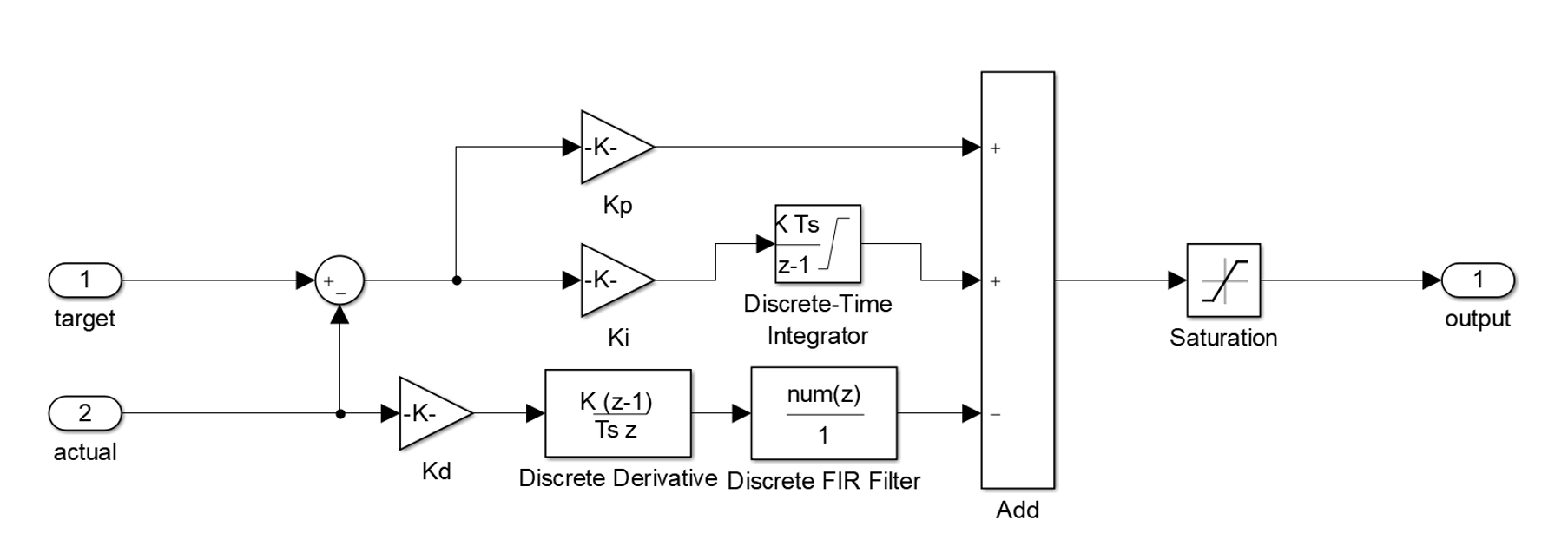
- Cut overshoot to under 5% utilizing cascaded control loops with PID controllers and implemented it in Simulink
- Linearized the elevation axis while simultaneously reducing the reliance on the integral term eliminating oscillations
- Added a feed-forward compensator using an experimentally derived thrust vs. elevation angle curve
- Implemented a force mixer to compute motor thrusts from net thrust and differential thrust prioritizing pitch control