Back to ProjectsView on GitHub
Robotic Arm
May 2022 - August 2022
C++
Arduino
Servo Motors
Inverse Kinematics
Robotics
Mechatronics
PlatformIO
both
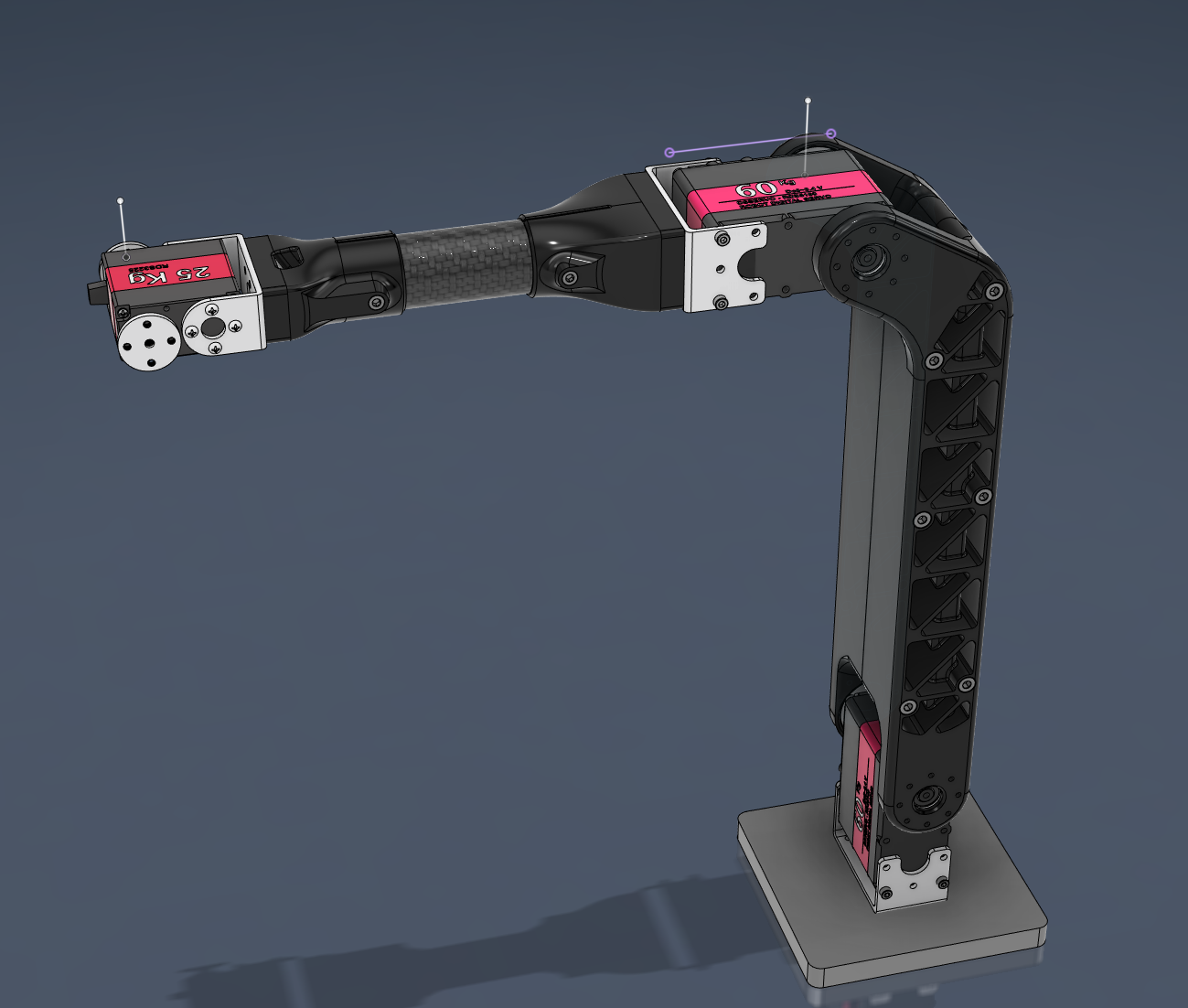
I designed and built a robotic arm with precise and smooth position control.
Key achievements:
- Implemented inverse kinematics algorithms to enable intuitive control of the end of the arm
- Developed custom C++ control software to coordinate motion across multiple servo motors
- Implemented acceleration, velocity, and position control to allow for smooth placement of the robotic arm