Back to ProjectsView on GitHub


Reinforcement Learning Race Car
January 2025 - April 2025
Python
Reinforcement Learning
Stable-Baselines3
BeamNG.tech
Gymnasium
software
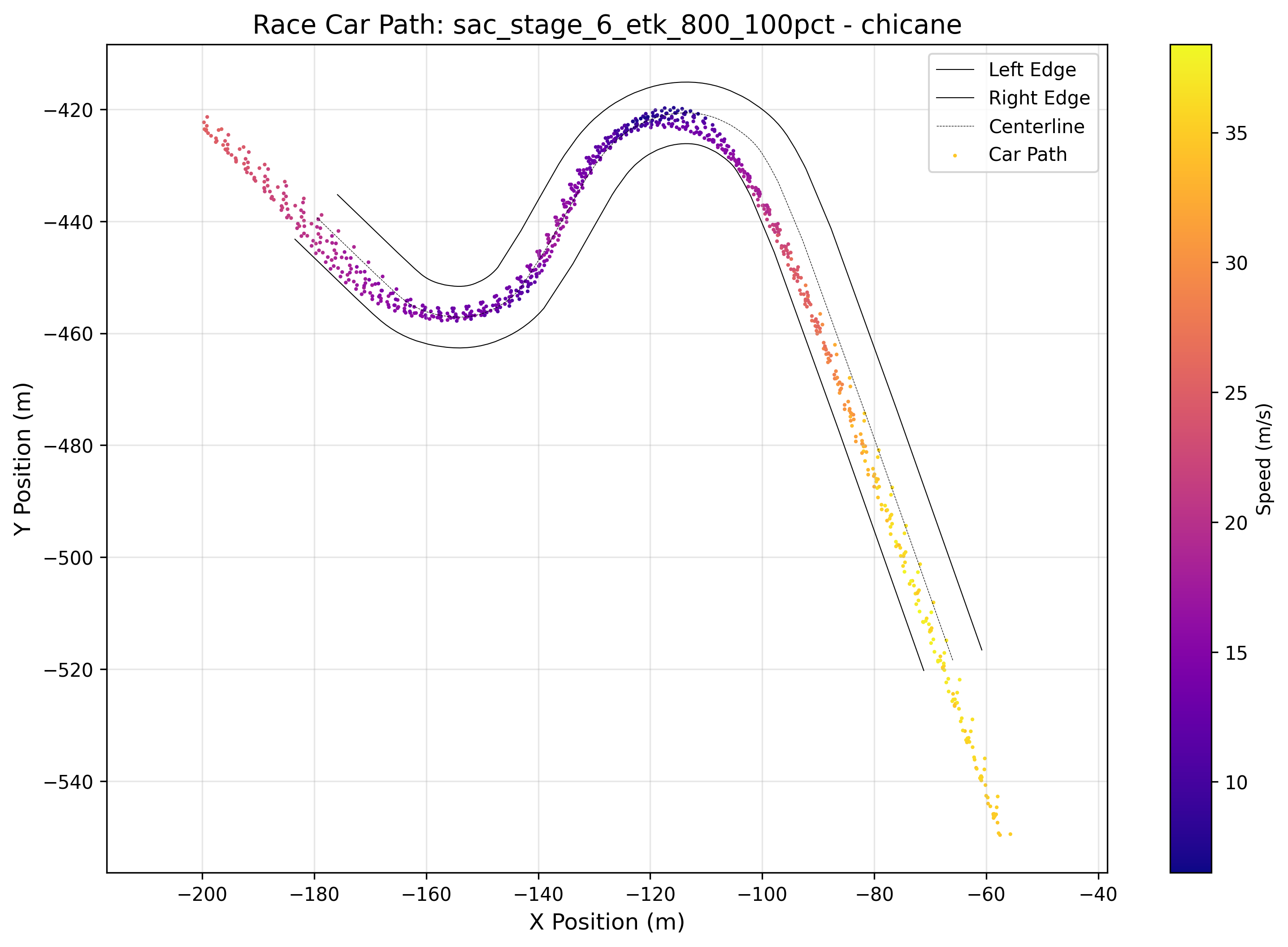
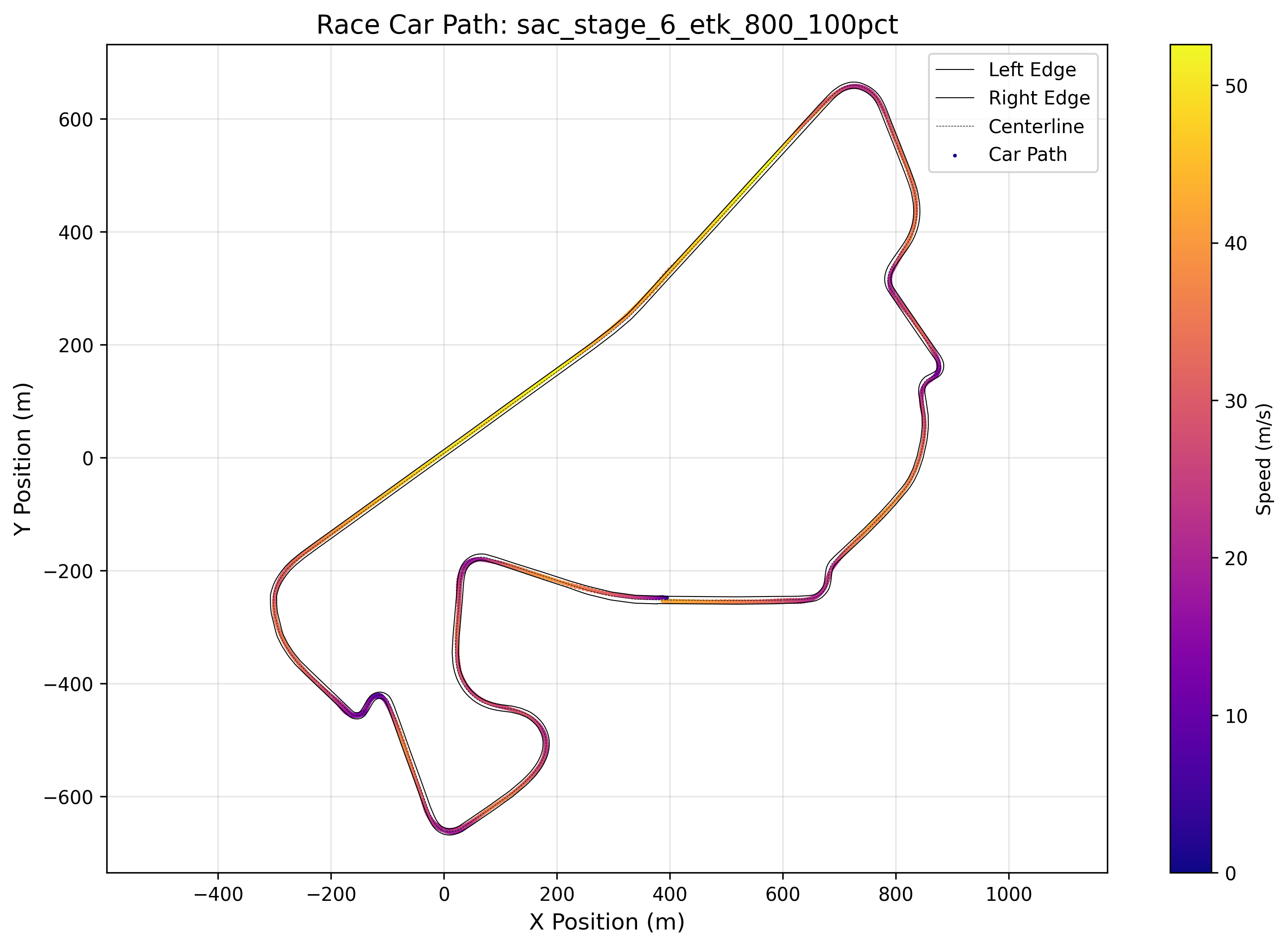
I implemented a reinforcement learning approach for autonomous race car control using the Soft Actor-Critic algorithm.
Key achievements:
- Achieved 100% lap completion and 141 second lap time on a 4.35 km long track
- Demonstrated viability of RL for autonomous race car control by implementing the Soft Actor-Critic RL algorithm from Stable-Baselines3
- Enabled successful learning through the use of reward functions
- Implemented an observation space with simulated LiDAR readings in a gymnasium wrapper class
- Utilized BeamNG.tech simulator for testing and training