Back to ProjectsView on GitHub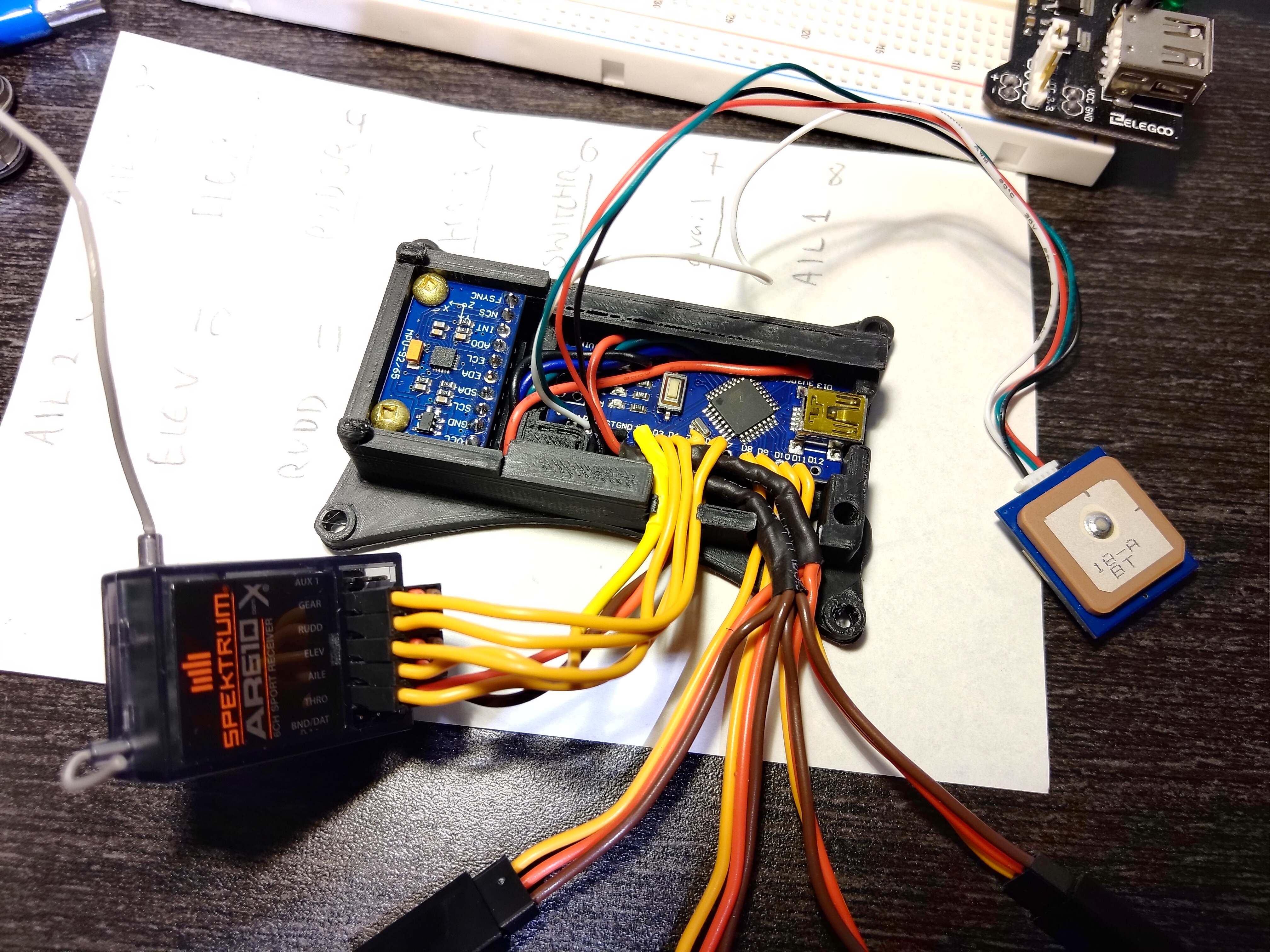

Autonomous Vehicle Controller
August 2020 - November 2020
Arduino
C++
IMU
GPS
PID Controllers
PWM
I2C
3D Printing
software
Inspired by advancements in autonomous vehicles, I created a custom autonomous vehicle controller by integrating hardware and software components.
Key features:
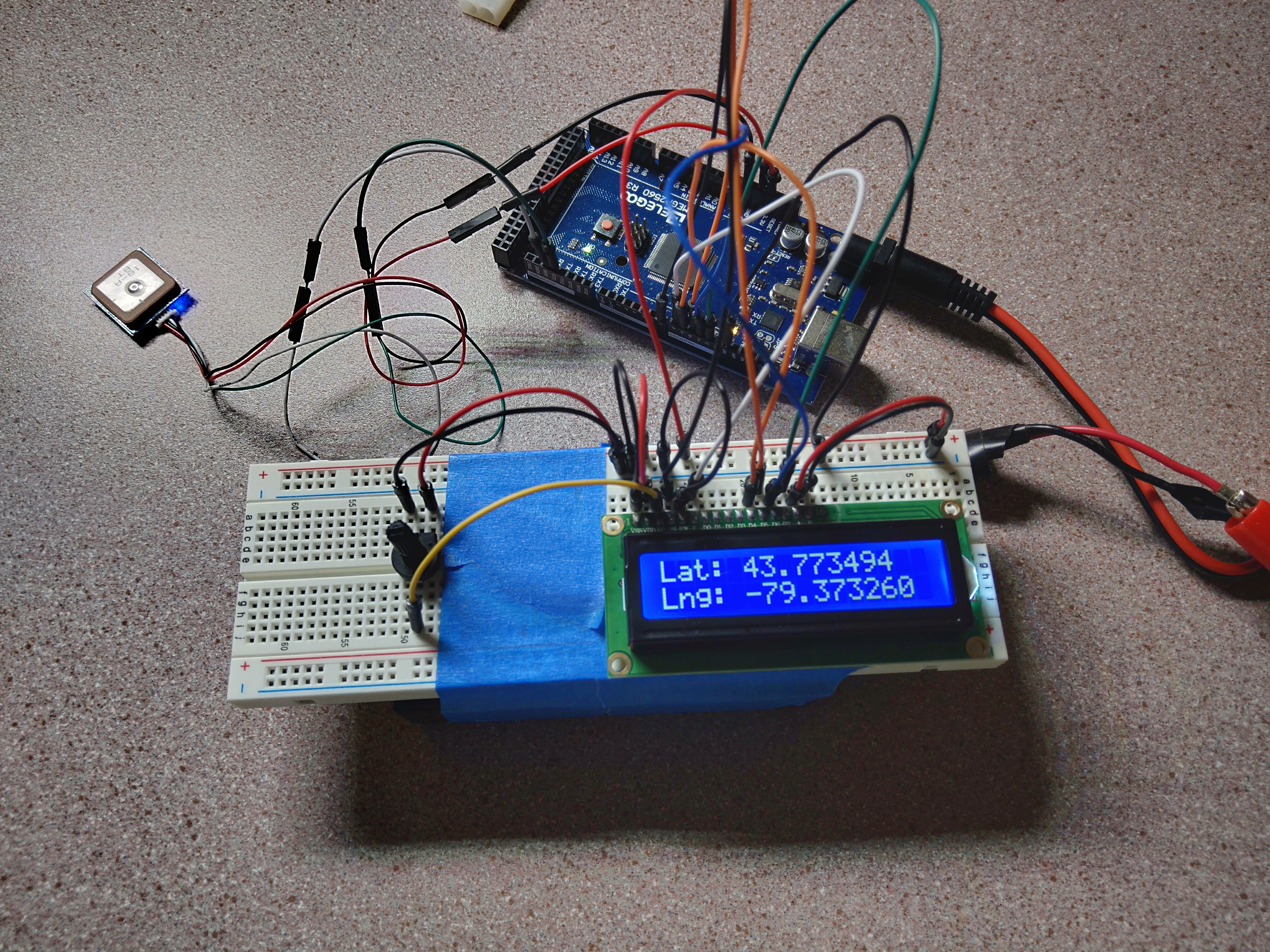
- Integrated an IMU using I2C, GPS module, and Arduino Nano into a 3D printed enclosure
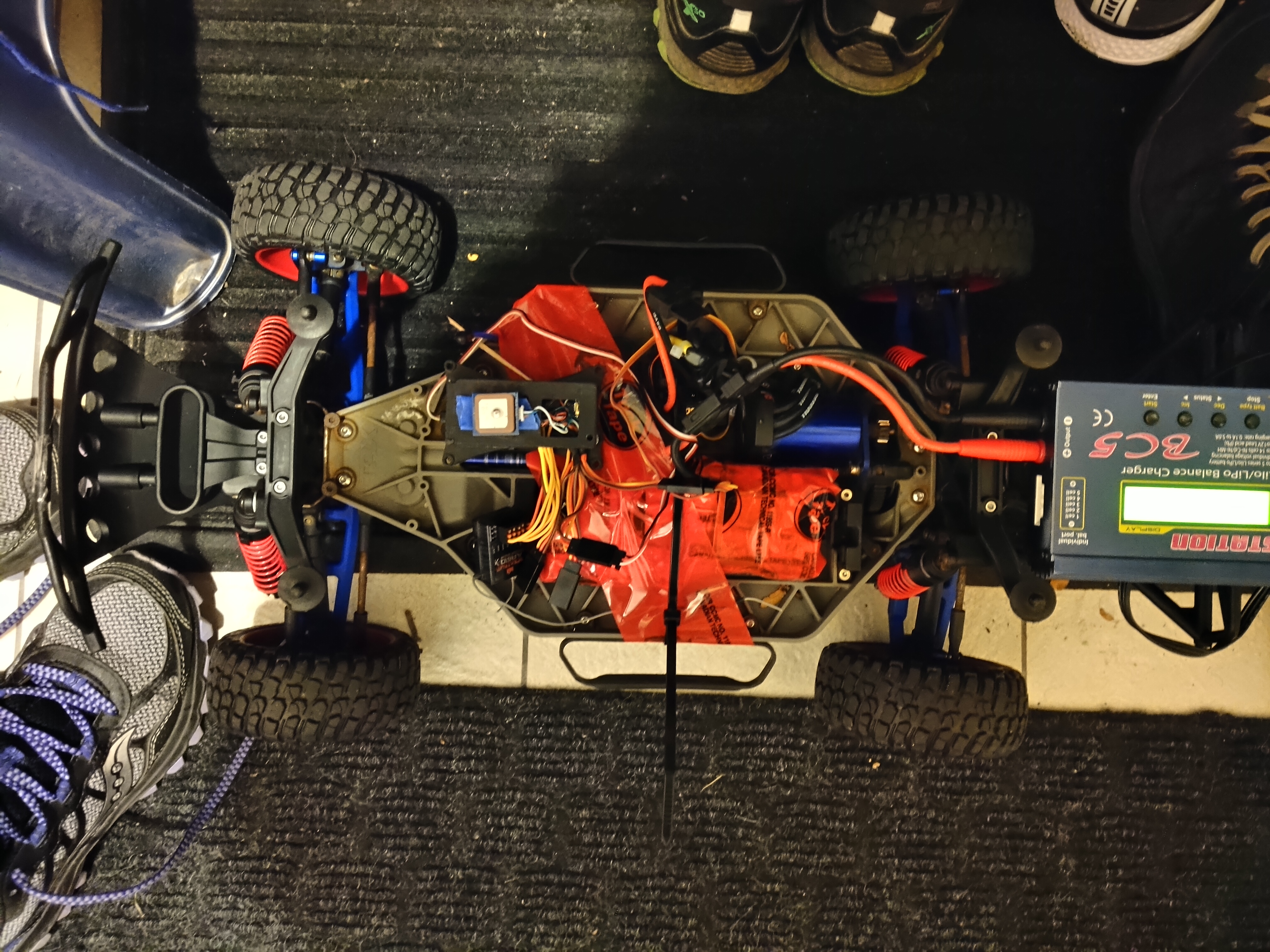
- Output PWM signals to motors and servos capable of autonomously navigating a vehicle on pre-defined paths
- Computed vehicle orientation and heading using IMU data and fused with a complimentary filter
- Developed waypoint navigation algorithms for determining required heading
- Implemented PID-based control systems for cruise control and path tracking
- Tested the controller on a 1/10th scale RC car with manual control overrides