Back to ProjectsView on GitHub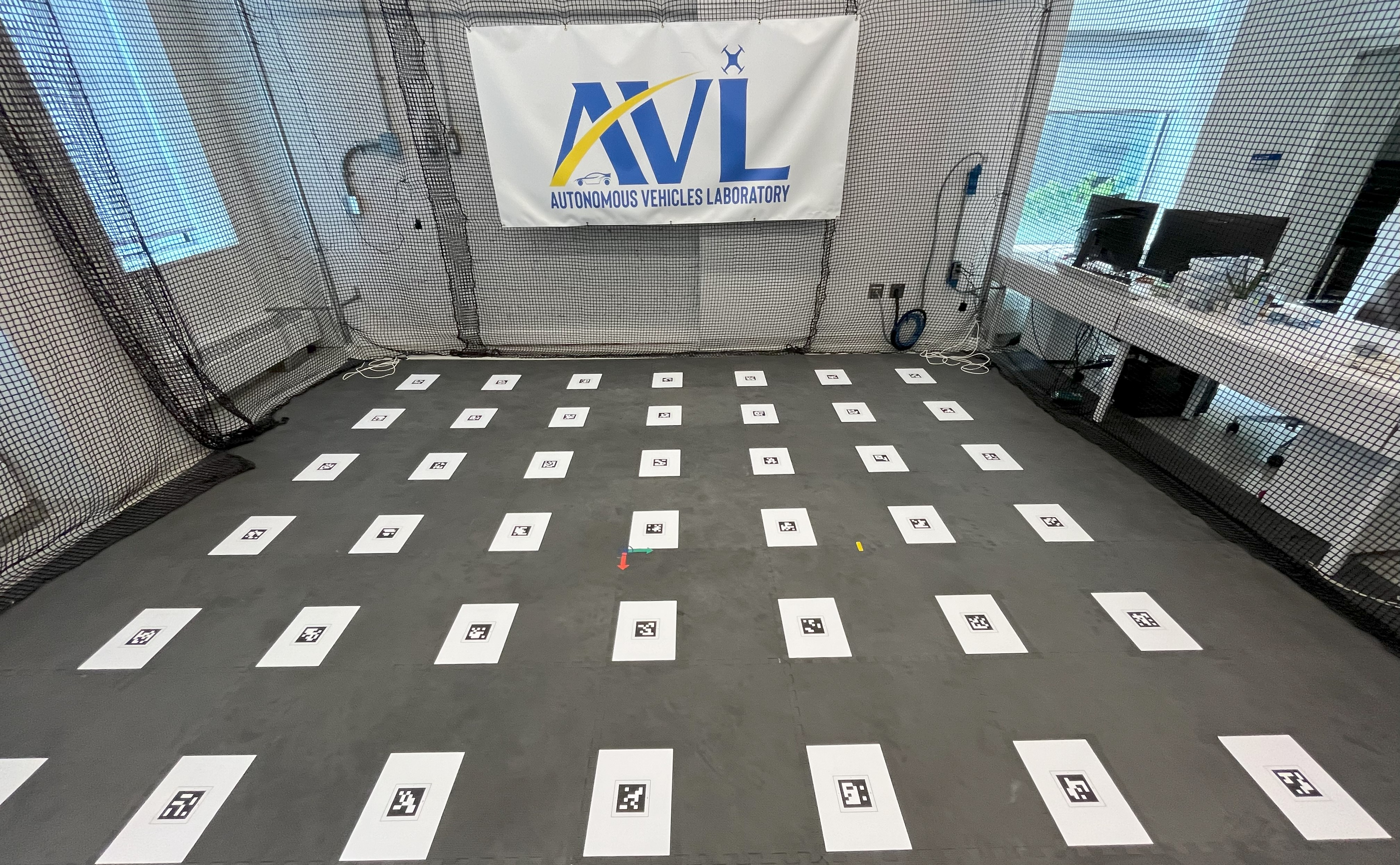

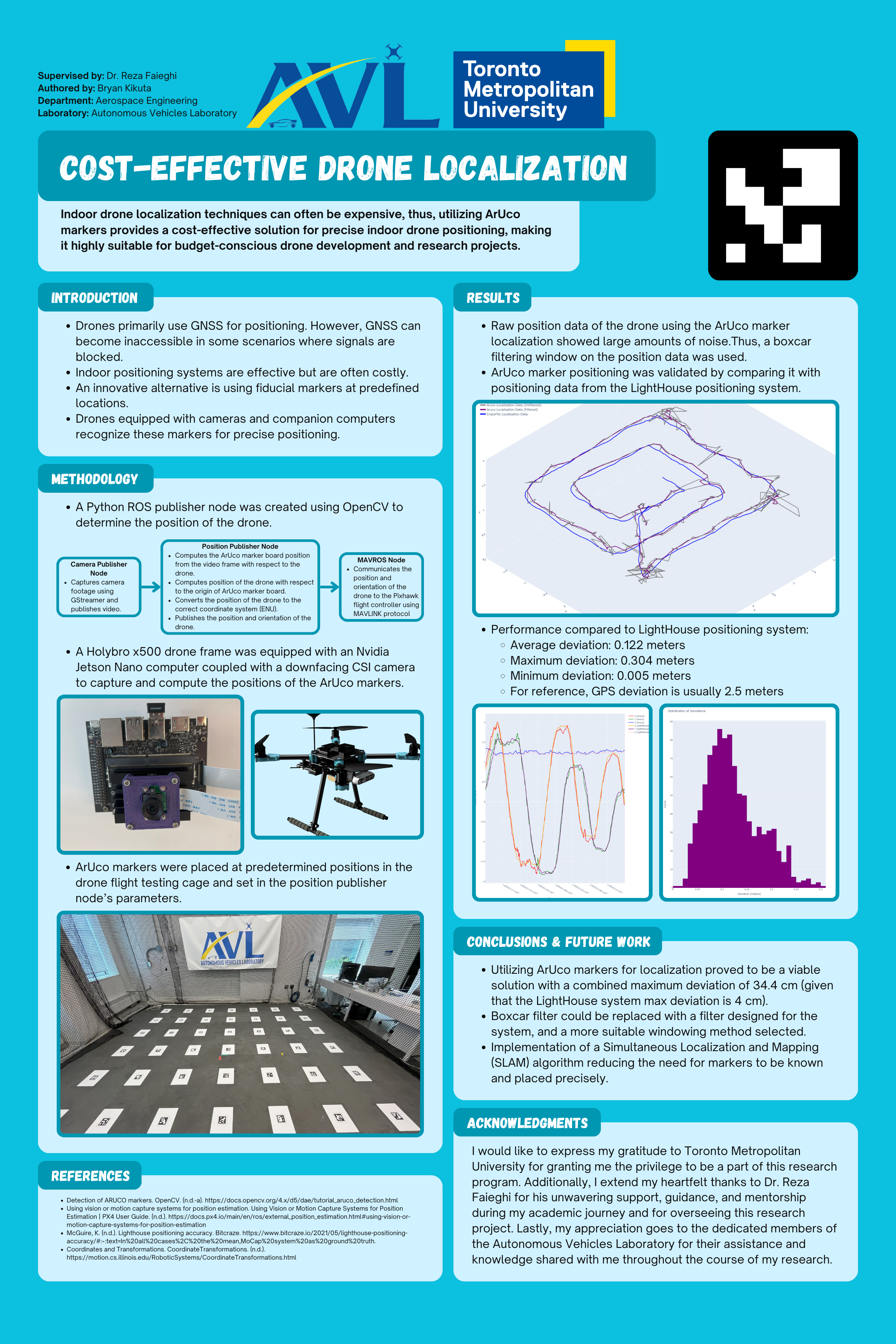
Indoor Drone Localization System
May 2023 - August 2023
ROS
Python
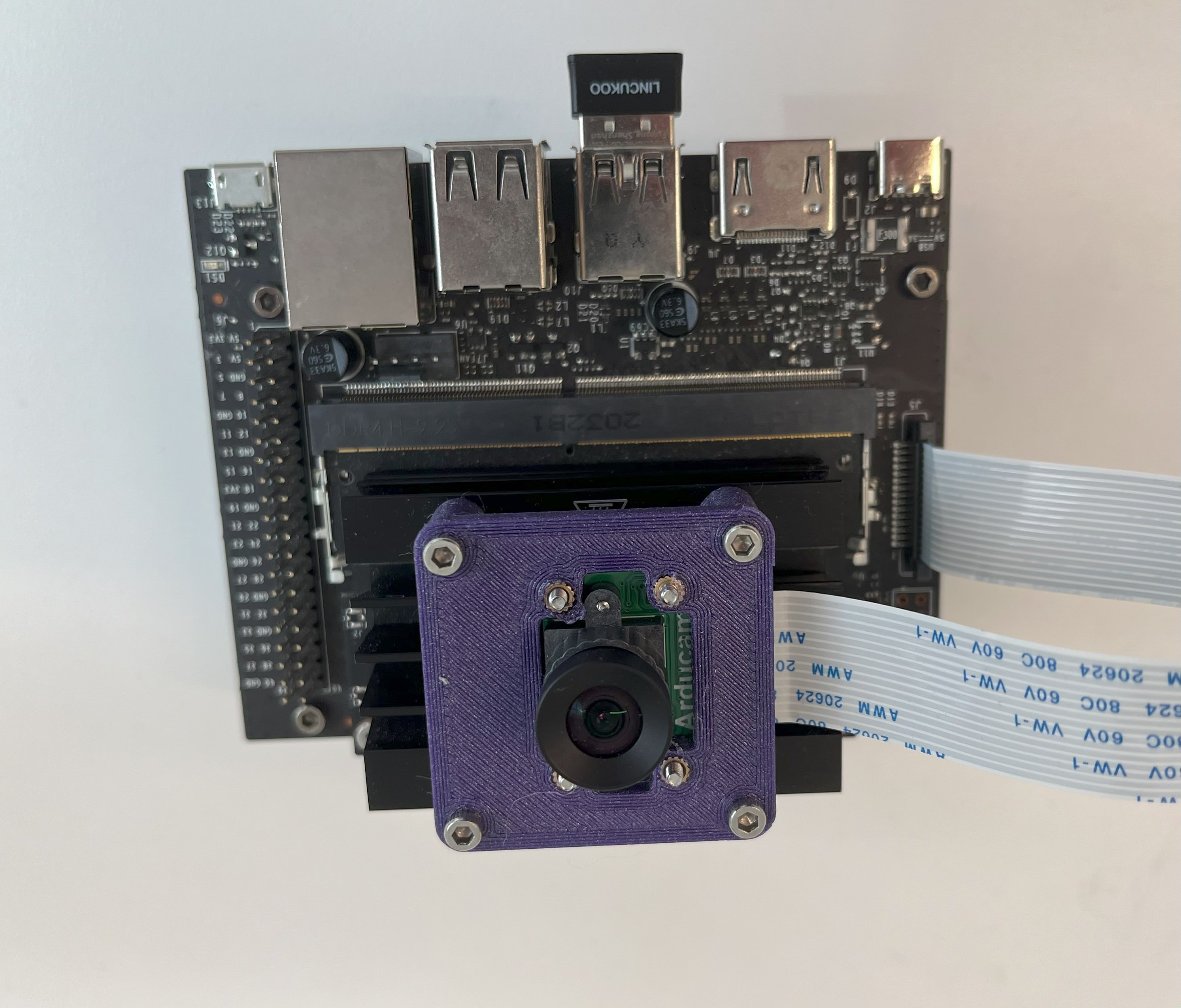
Nvidia Jetson Nano
Pixhawk
Computer Vision
OpenCV
ArUco Markers
software
I developed an indoor drone localization system for GNSS-denied environments at 15% cost of traditional systems.
Key features:
- Utilized a camera-vision based approach implemented with ROS on an Nvidia Jetson Nano computer
- Integrated with a Pixhawk flight controller
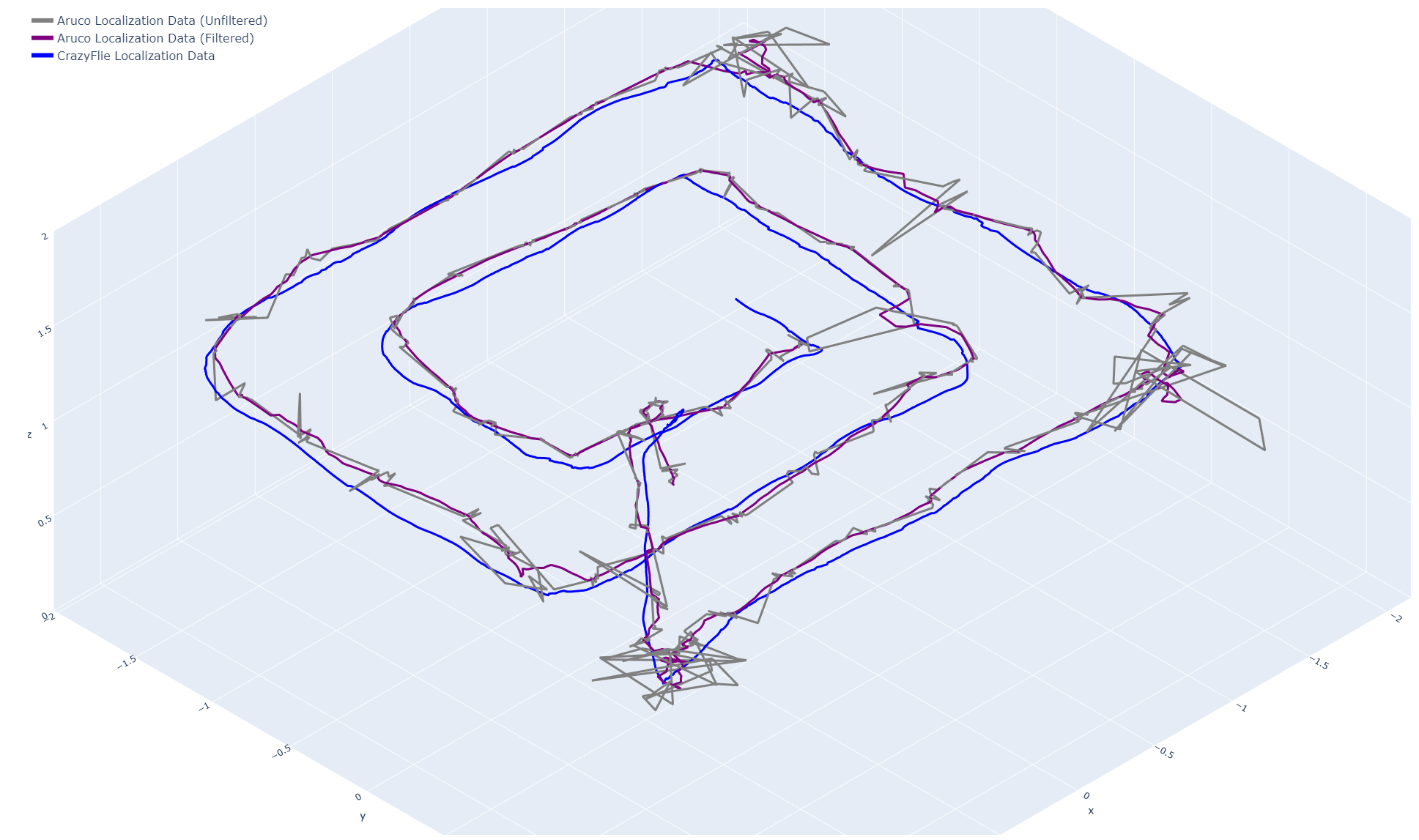
- Achieved accuracy of 30 cm on a multi-rotor drone indoors
- Localized the drone globally by determining the positions of ArUco markers with OpenCV
- Performed coordinate system transformations to determine the global position of the drone for autonomous flight